周辺光の影響を受けにくいLiDAR受光回路

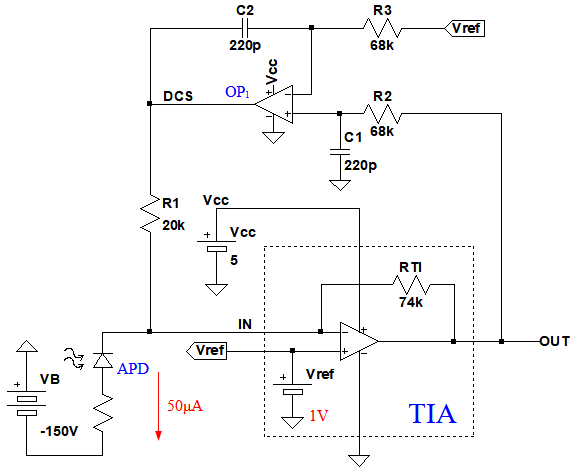
図1は,レーザ距離計に使用する,LiDAR(ライダ)受光回路です.高感度フォト・ダイオードのAPDで,レーザの反射パルス光を検出し,TIAで電圧に変換してOUT端子に出力します.また,OP1はAPDに照射される周辺光の影響を軽減する働きをします.
図1の回路のAPDに太陽光があたり,APDに50μAの直流電流が流れました.このとき,OUT端子の直流電圧はいくつになるでしょうか.ただし,OP1とTIAは,レール・ツー・レール出力が可能なものとします.
APD:Avalanche Photodiodes
TIA:TransImpedance Amplifier
APDに50μAの直流電流が流れた都にのOUT端子の直流電圧は?
(a) 0.1V (b) 1V (c) 2V (d) 4.7V

図1のTIAは,反転アンプとして動作し,IN端子に入力された電流をRTIで電圧に変換します.また,OP1は非反転型の積分回路を構成しています.OUT端子の直流電圧変化に対し,OP1の出力電圧がどのように変化するかを考えれば,答えが分かります.
OUT端子の直流電圧がVrefよりも大きくなると,OP1の出力電圧が大きくなります.OP1の出力電圧は,抵抗(R1)を介してTIAに入力されているので,OP1の出力電圧が大きくなると,OUT端子の直流電圧が下がります.このようにしてOUT端子の直流電圧がVrefと同じになるように制御されます.I1に直流電流が流れても,OUT端子の電圧は,Vrefと同じになるため,OUT端子の電圧は1Vになります.
●LiDARの基本的な仕組みと課題
LiDAR(Light Detection And Ranging)は,近年,自動運転などでの応用が注目を集めている技術です.LiDARは,レーザのパルス光を対象物に照射し,反射光が戻ってくるまでの時間を計測することで,対象物までの距離を計算します.このような方式をToF(Time of Flight)と呼びます.
レーザを使用することで,対象物までの距離や対象物の形状を,電波を使うレーダよりも,高精度に検出することが可能です.反射光の強さは,距離の2乗に反比例するため,対象物までの距離が遠くなると,反射光は非常に小さくなります.反射光を大きくするには,レーザのパワーを大きくする必要がありますが,安全面から限界があります.
そこで,平均パワーを維持しながら,レーザのパルス幅を狭くすることで,ピーク・パワーを大きくすることが行われます.パルス幅が5ns以下となるため,受光回路は,広帯域で高感度なものが必要になります.また,受光回路の感度を上げると,太陽光等の周辺光の影響を受けやすくなる,という課題があります.
●高感度なフォト・ダイオード
LiDAR受光回路では,反射光の検出のために,高感度なフォト・ダイオードのAPD(Avalanche Photodiodes)が使用されます.弱い光も広帯域に電流に変換できるためです.
APDで光電流が発生する原理は通常のフォト・ダイオードと同じです.ただし,APDは,高い逆バイアス電圧をかけることで,光によって発生した電子-正孔対が,次々に雪崩(avalanche)のように新たな電子-正孔対を発生させることで,光電流が増幅されます(2).電流の増倍率は,逆バイアス電圧をを大きくするほど,大きくなります.
●APDで発生した光電流を電圧に変換するTIA
APDで発生した光電流は,TIA(TransImpedance Amplifier)で電圧に変換します.図2は,基本的なTIAの動作をシミュレーションするための回路です.OPアンプによる電流電圧変換回路となっています.RTIが電流を電圧に変換するための抵抗です.入力電流はRTIを左向きに流れるため,OUT端子の電圧は(VOUT)式1で表されます.
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・(1)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・(1)
電流源Irがレーザの反射光でAPDに発生したパルス電流です.IDCは周辺光によってAPDに発生した直流電流を模擬しています.図2では「.step」コマンドでIDCを0,50μA,100μAと変化させます.
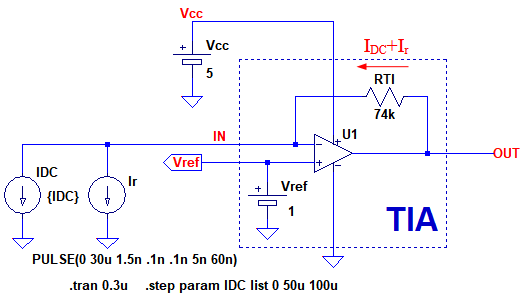
「.step」コマンドでIDCを0,50μA,100μAと変化させる.
図3は,図2のシミュレーション結果です.IDCが0のときは,OUT端子にIrに対応したパルス電圧が出力されていますが,IDCが50μAと100μAのときは,OUT端子の電圧が電源に張り付き,パルス電圧が十分に出力されていません.
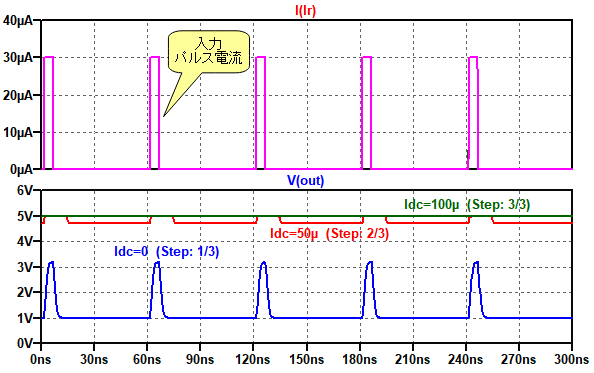
IDCが0のときだけ,OUT端子にIrに対応したパルス電圧が出力されている.
●TIAに周辺光キャンセル回路を追加する
図3のシミュレーション結果から分かるように,図2のTIAを使用したLiDAR受光回路は,周辺光の影響で正常に動作しなくなってしまうことがあります.そこで,周辺光の影響をキャンセルする回路を追加したものが図1の回路です.そして,図4が,図1の回路の周波数特性をシミュレーションするための回路です.
I1が信号電流源で,直流電流値は50μAとなっています.OP1は非反転積分回路を構成しており,OUT端子の直流電圧がVrefと等しくなるように,R1を介してTIAに帰還をかけます.この回路は,「オーディオ用アンプのDCサーボ回路」(3)等で使用されているものと同じものです.
OUT端子の直流電圧がVrefよりも大きくなると,OP1の出力電圧が大きくなり,R1を介して電流をIN端子に流し込こみます.すると,TIAは反転アンプのため,OUT端子の直流電圧が下がります.このようにしてOUT端子の直流電圧がVrefと同じになるように制御します.そのため,I1に直流電流が流れても,OUT端子の直流電圧は変化しません.
OP1で補償できるI1の直流電流の最大値(IDCMX)は,OP1の最大出力電圧をVOMAXとすると,式2で表されます.
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(2)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(2)
この回路は,I1の直流電流値が変化してもOUT端子の電圧は変化しませんが,交流電流の場合は,その交流電流に対応した電圧がOUT端子に発生します.つまり,ハイパス・フィルタとなっており「R3=R2,C2=C1」とすると,カットオフ周波数(fC)は式3で表されます.
 ・・・・・・・・・・・・・・・・(3)
・・・・・・・・・・・・・・・・(3)
図4の回路には,シミュレーション実施後の動作点電圧が表示されおり,OUT端子の電圧は1Vとなっています.ここで,DCS点の電圧は2Vとなっており,R1には50μAの電流が流れています.つまり,I1の電流はすべてR1が供給しており,RTIには直流電流は流れません.そのため,OUT端子の電圧はVrefと同じ1Vになっています.
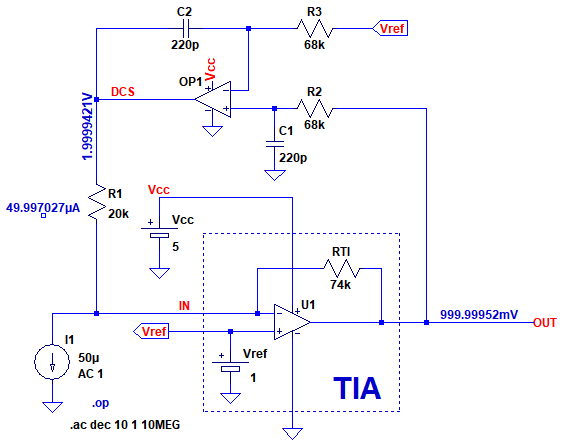
OP1は非反転積分回路を構成しており,OUT端子の直流電圧をVrefと等しくする
図5は,図4の周波数特性のシミュレーション結果です.縦軸は電流入力に対する電圧ゲインを表しており,1MHzでのゲインは97.4dBとなっています.この値からトランス・インピーダンスを計算すると,74kΩとなります.また,ゲインは,ハイパス・フィルタ特性となっており,カットオフ周波数は39.4kHzで式2の計算結果と一致しています.
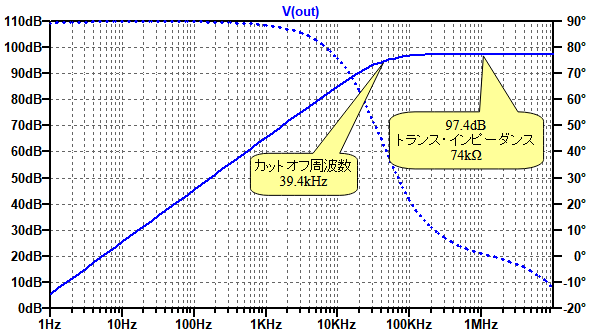
ハイパス・フィルタ特性となっており,カットオフ周波数は39.4kHzとなっている.
●TIAを使用したLiDAR受光回路を確認する
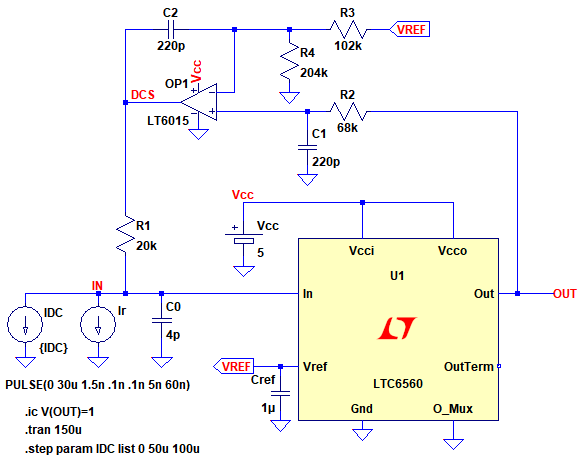
図4は,理想OPアンプを使用した回路でしたが,次は,実在するTIA用IC(LTC6560)を使用した回路のシミュレーションを行います.LTC6560は,LiDAR受光回路に適した220MHz帯域幅のロー・ノイズTIA(4)です.図6が,LTC6560を使用した,LiDAR受光回路をシミュレーションするための回路です.
Vref端子の電圧を抵抗で分割して,DCサーボ回路の基準電圧として使用する.
図6には,図4と同様に,周辺光の影響をキャンセルする回路が追加されています.ただし,LTC6560のOUT端子の直流電圧は,内蔵されたレベル・シフト回路の影響で,Vref端子の電圧よりも低くなっています.Vref端子の電圧が1.5Vとなっているのに対し,OUT端子の電圧は1Vとなっています.そのため,Vref端子の電圧を,直接DCサーボ回路の基準電圧として使用することができません.そこで,Vref端子の電圧を抵抗で分割して,DCサーボ回路の基準電圧として使用します.
図6のR3とR4が分圧用の抵抗です.R3とR4は,並列抵抗値がR2と等しく,分圧比(N)が1/1.5となる必要があります.そのため,式4と式5の連立方程式を解いてR4とR3の値を求めます.
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(4)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(4) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(5)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(5)式4,式5からR4を求めると,式6のように204kΩとなります.
 ・・・・・・・・・・・・・・・・・・・・・・・(6)
・・・・・・・・・・・・・・・・・・・・・・・(6)同様に,R3を求めると,式7のように102kΩになります.
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・(7)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・(7)図7は,図6のシミュレーション結果です.図7の上段がDCS点の電圧で,下段がOUT端子の電圧です.DCS点の電圧は,IDCの大きさによって変化しています.また,OUT端子の直流電圧は,IDCが変化しても変わっていないことが分かります.
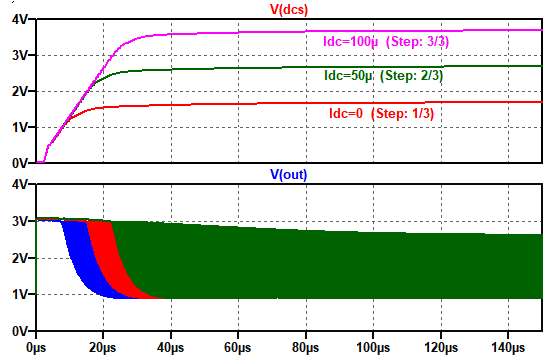
DCS点の電圧は,IDCの大きさによって変化している
図8は,図7の時間軸を拡大したものです.図8の下段のOUT端子の波形を見ると,パルス波はすべて重なっており,IDCの値が変化しても,光電流を正しく電圧に変換できていることが分かります.
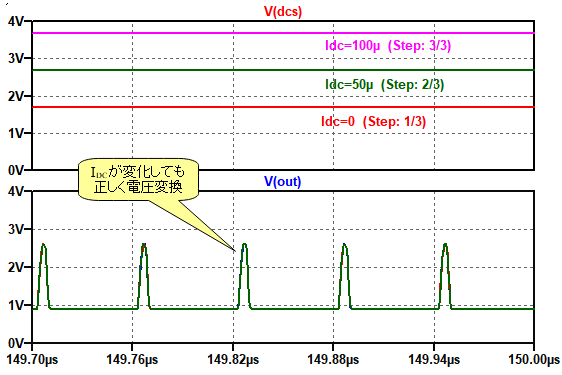
IDCの値が変化しても,光電流を正しく電圧に変換できている.
以上,LiDAR受光回路で,周辺光の影響をキャンセルする回路について解説しました.LTC6560の詳細な特性や使い方は,データシートを参照してください.
◆参考・引用*文献◆
(1)アナログデバイセズ:LIDARレシーバーで周辺光の影響をキャンセルする方法
(2)浜松ホトニクス:技術資料 / Si APD
(3)LTspiceで学ぶオーディオ回路入門:パワー・アンプの直流電圧からスピーカを守る回路
(4)アナログデバイセズ:LTC6560データシート
解説に使用しました,LTspiceの回路をダウンロードできます.
LTspice10_045.zip
●データ・ファイル内容
TIA.asc:図2の回路
TIA.plt:図3のグラフを描画するためのPlot settinngsファイル
TIA_DCS.asc:図4の回路
TIA_DCS.plt:図5のグラフを描画するためのPlot settinngsファイル
LTC6560_DCS.asc:図6の回路
LTC6560_DCS.plt:図7のグラフを描画するためのPlot settinngsファイル
■LTspice関連リンク先
(01) LTspice ダウンロード先
(02) LTspice Users Club
(03) LTspice メール・マガジン全アーカイブs
(04) ◆LTspice電子回路マラソン・アーカイブs
(05) ◆LTspiceアナログ電子回路入門アーカイブs
(06) ◆LTspice電源&アナログ回路入門アーカイブs
(07) ◆IoT時代のLTspiceアナログ回路入門アーカイブs
(08) ◆オームの法則から学ぶLTspiceアナログ回路入門アーカイブs
(09) ◆LTspiceエデュケーショナル・ファイルで学ぶアナログ回路アーカイブs
(10) ◆LTspiceドット・コマンドから学ぶアナログ回路アーカイブs
(11) ◆LTspiceで始める実用電子回路入門アーカイブs