インターフェース通信 2022年04月号
特集「ドローン自律飛行」【立ち読み版】




|
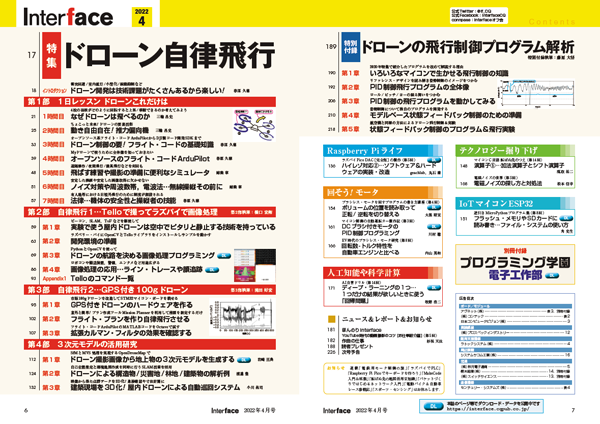
Interface2022年4月号の特集は「ドローン自律飛行」です.第1部では,これだけは知っておきたいドローンの基礎知識を解説します.第2部では,屋内ドローンで画像処理を利用した自律飛行を実験します.第3部では,GPSを利用した自律飛行を屋外で実験します.第4部では,3次元モデルの活用研究を事例で解説します.
|
4月号には,別冊付録「プログラミング学園 電子工作部 4月号」が付属します. 第1章 一長一短! 3つの温度センサ 第2章 トランジスタ2石とOPアンプ1個で作る体脂肪計 第3章 DSPチップを使ったFMラジオ 第4章 振り子/加速度センサ/圧電スピーカによる歩数計の研究 第5章 インターネット接続の雨降り警報器 |

ドローンの利用シーンは2015年まで空撮が中心でした.2015年末にドローンの利用分野を広げるために航空法が改正され,多くの分野での利用が進められています.物流の分野では,特に山間部や離島など,搬送が困難な地域で検討が進められています.

ドローンというと,4つや6つや8つのプロペラを持つ多発回転翼機(マルチロータ・ヘリコプタまたはマルチコプタとも言う)をイメージする人が多いと思います.しかし,マルチコプタだけがドローンではありません.
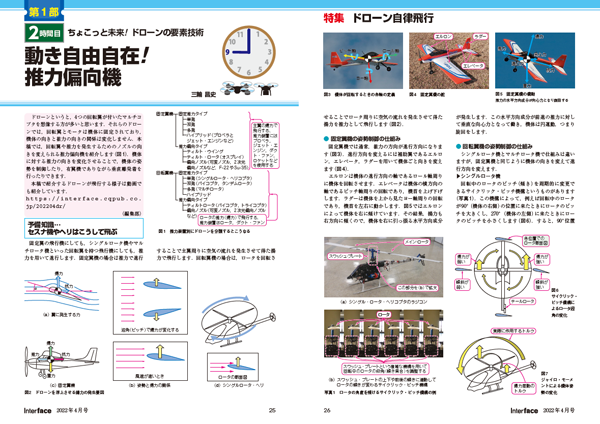
本稿では,回転翼や推力を発生するためのノズルの向きを変えられる推力偏向機を紹介します.機体に対する推力の向きを変化させることで,機体の姿勢を制御したり,有翼機でありながら垂直離発着を行ったりできます.
本稿で紹介するドローンが飛行する様子は動画でも紹介しています.(編集部)

ドローンに搭載したカメラの画像をOpenCVを使って処理し,自律飛行に挑戦します.ドローンとして,カメラを搭載しているTello(Ryze Technology社)を使います.画像処理の結果を基にドローンへ移動指令を送る処理は,OpenCVをインストールしたラズベリー・パイ
で行います.ラズベリー・パイとドローンとはWi-Fiで通信します.プログラムはPythonで記述します.

PythonとOpenCVを使って,Telloのカメラ画像に画像処理を施します.特定の色の物体をTelloが追跡する,ビジュアル・フィードバックも試してみます.

第3部では,規制除外である100g未満のドローンを用意し,GPS座標のウェイ・ポイント飛行を,オープンソースのオート・パイロット・システムArduPilotを使って実現しました.

本章では,第1章で製作したドローンを実際に飛行させてみます.飛行はフライトプラン(飛行ルート)を作成・書き込み,指定された場所(ウェイポイント)を通過するように行います.ドローンの自己位置は,GPSで緯度・経度の座標を取得して推定します.

ドローンのさまざまな分野での利用が進んでいます.特に,2次元画像から疎な3次元点群を生成するSfM(Structure from Motion)と,複数枚の2次元画像から密な3次元点群データを生成するMVS(Multi View Stereo)の登場は,これまで専用の機器や高度な技術が必要であった3次元モデルと正射投影画像の作成を容易にした点で,画期的なものでした.

国内に70万ある橋は,5年に1回の定期的な近接目視点検が平成26年に義務付けられています.点検は高所作業車や橋梁点検車を用いての作業であるため,安全面への配慮と点検コストの低減,今後予想される労働者不足への対処のために,ロボットによる支援が求められています.
■次号予告
■Interfaceフロアガイド

今回のInterfaceフロアガイドは,「新宿」の待ち合わせ場所で有名な,紀伊國屋書店 新宿本店を紹介します.本誌の売り場は,8階の理工学書/建築/コンピュータ・フロアで,棚番号は,F14の電気雑誌となります.本棚は,新刊が平積みされ,関連雑誌も見やすく面陳列されています.さらに隣の本棚(F15)はCQ出版の本棚となっていて,本誌以外の雑誌・書籍が数多く陳列されていました.各フロアでは,週間ランキングや興味深いフェアが開催されており,「選びやすく,買いやすい」工夫がいっぱいでした.新宿にお越しの際はぜひお立ち寄りください.(編集部)
●紀伊國屋書店 新宿本店 東京都新宿区新宿3丁目17-7
■見逃しインターフェース
|
Interface2021年11月号の特集は「マルチコア時代の並列プログラミング」となります.現在,PCやサーバはもちろん,組み込み用の1ボードPCでさえマルチコアになってきています.半導体プロセスも微細化が進み,CPUコアの占める面積が小さくなり,今後もマルチコア化は進むと予想されます.しかし,マルチコア・コンピュータの性能を引き出すには,並列処理が重要となります.そこで特集では,それらの並列化技術と並列処理で避けて通れない排他制御について解説します.
|
■Interface バックナンバー

|
マルチコア時代の並列プログラミング
3Dプリンタ入門
数学とプログラミング
ラズパイのマイコンPico 攻略本
IoTプロトタイプ製作入門
打ちながら覚えるPython文法
Pythonで無線信号処理
Amazon×マイコン FreeRTOS入門
Pythonで信号処理 時系列データ解析編
作るOS・言語・コンパイラ 低レイヤ入門
Jetson/ラズパイ/PCで自習 Python画像処理100
5G時代! 無線モジュール規格別プログラム集
ESP32で画像処理プログラム100
AIチップ図鑑&実力大研究
最新ラズパイ4のハード&OS大研究
マイコン人工知能で測る
AI時代の画像処理教科書
科学計算とPythonの研究
C/C++後継 モダン言語の研究
映像ソーシャル時代 マイクロIoTカメラ
飛行・走行・航行 ドローン&ロボ制御
組み込みコンピュータ技術512
定番 ESP32マイコン技術百科
注目オープンソース RISC-Vマイコン
水・海洋IoTセンシング&カメラ実験研究
プログラミング学習の研究
■Interface関連リンク先
(1) Interfaceホームページ
(2) Interface(CQ出版)twitter
(3) Interface オフ会のページ
(4) Interface facebook
(5) インターフェース通信【立ち読み版】まとめ
(6) Interface バックナンバー