OPアンプが扱える正弦波の最高周波数

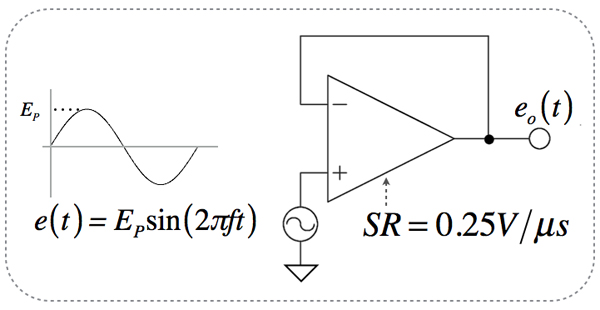
図1に示すのは,スルー・レート0.25V/μsのOPアンプで作ったボルテージ・フォロワです.この回路に最大振幅Epが2Vの正弦波(e(t)=Ep*sin(2πft))を入力して周波数を上げていくと,ある周波数を境に出力が入力に追随しなくなります.その周波数はいくつでしょうか.
A:約20kHz
B:約40kHz
A
ボルテージ・フォロワの出力波形は,OPアンプのスルー・レートにより制限されます.最大振幅Epが2Vの正弦波(e(t)=Ep*sin(2πft))を入力して周波数を上げていき出力が,入力に追随しなくなる境目の周波数は
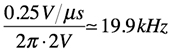 となり約20kHzです.
となり約20kHzです.
●まずは計算式で答えを導きだします
OPアンプは,負帰還による発振を防ぐための位相補償コンデンサがあります.この位相補償コンデンサの充電や放電より速く変化する入力信号に対して,出力は追随できません.決められた時間に対して出力が変化したときの傾きがスルー・レート(SR)で,1μsあたりに何V変化できるかを現し,単位は[V/μs]です.問のボルテージ・フォロワの非反転端子に入力した信号を歪み無く出力するには入力信号の時間に対する振幅の変化よりスルー・レートが大きい必要があります.
正弦波の時間に対する振幅の変化が最大になる値は,正弦波:e(t)=Ep*sin(2πft)を時間で微分した最大値です.e(t)を時間で微分し時間に対する振幅の変化を調べると,
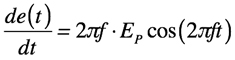 ・・・・・・・・・・・・・・・・・・・・・・・・(1)
・・・・・・・・・・・・・・・・・・・・・・・・(1)
式1は,cosの関数なので,式1の右辺が最大となるのはcos(2πft)=1のときです.
したがってe(t)の時間に対する振幅の変化の最大は,
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・(2)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・(2)
スルー・レートも時間に対する振幅の変化ですから,式3が周波数を上げていくと出力が入力に追随しなくなる周波数の境目を現しています.
 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(3)
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・(3)式3に スルー・レート(SR)=0.25V/μs,Ep=2Vとし周波数:fを求めると
 ・・・・・・・・・・・・・・・・・・・・・・・・・・(4)
・・・・・・・・・・・・・・・・・・・・・・・・・・(4)
となり,答えの約20kHzが導きだせます.
●LTspiceを使用して,スルー・レートを測ってみます
ここからは,スルー・レート0.25V/μsのOPアンプを使ったボルテージ・フォロワへ入力信号振幅がEp=2Vの周波数を変化させ,出力応答の波形の変化をLTspiceを使用して確かめます.
スルー・レートの測定方法は電子情報技術産業協会規格(EIAJ ED-5103A)「リニア集積回路測定方法(演算増幅器及びコンパレータ)」
で閲覧できます.その測り方は出力波形の振幅が10%~90%変化するときの傾斜として定義されています.0.25V/μsのOPアンプとしてLT1001を使いますが,この測定方法でスルー・レートを確かめてみましょう.
図2がボルテージ・フォロワのスルー・レートを測定する回路で,入力へ振幅1V,立ち上がり時間/立ち下がり時間を1nsとした矩形波をボルテージ・フォロワの非反転端子へ入力しOUT端子の出力波形からスルー・レートを計算します.目視で値を知るのは困難です.そこで「.MEAS」コマンドで値を探し,スルー・レートを自動で計算させ,ログ・ファイルへ記録する方法を用います.
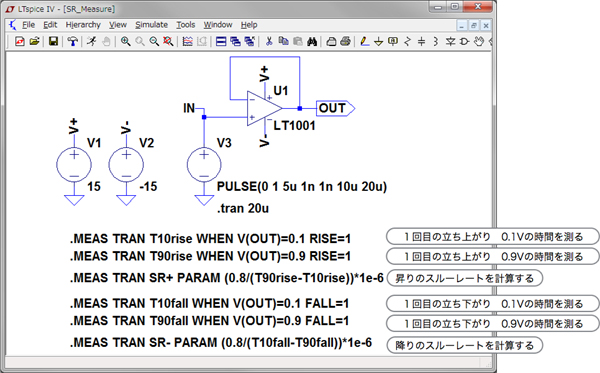
ボルテージ・フォロワの利得は1倍ですので,1Vの10%は0.1V,90%は0.9Vです.ボルテージ・フォロワ出力の立ち上がりの傾き/立ち下りの傾きにおいて 0.1V,0.9Vになる四つの時間を探し四つの変数へ記憶します.その値を用いてスルー・レートを計算させます.
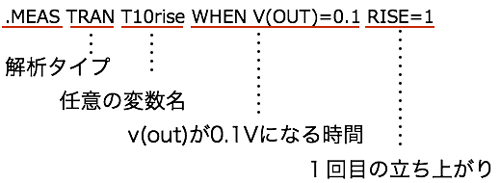
0.1Vになる時間を知る命令はLTspiceの文法から,
「.MEAS TRAN T10rise WHEN V(OUT)=0.1 RISE=1」(図3)となり
内容は「過渡解析において,1回目の立ち上がりの出力端子の電圧が0.1Vになる時間を変数T10riseへ入れなさい」となります.
同様に残り三つの時間を探し出して変数を入れます.スルー・レートの計算式は「.MEAS」のPARAMを用いて指定します.PARAMは複雑な計算式が使え,また他の「.MEAS」で使用している変数を計算式中に入れることもできます.
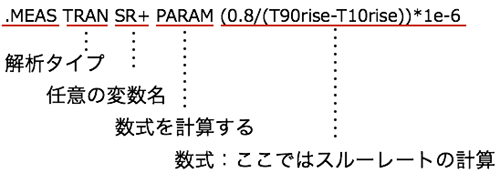
昇りのスルー・レートの計算を例にとるとLTspiceの文法から,
「.MEAS TRAN SR+ PARAM (0.8/(T90rise-T10rise))*1e-6」(図4)となり
内容は「過渡解析において,(0.8/(T90rise-T10rise))*1e-6を計算し変数SR+へ入れなさい」となります.0.8は1V*(0.9-0.1),T90rise,T10riseは,他の「.MEAS」で使った変数:0.1Vになる時間,0.9Vになる時間です.
ログ・ファイルを見るときはメニューバーの「View > SPICE Error Log」または,ショートカット・キーの「Ctrl+L」でログ・ファイルのウィンドが現れます.シミュレーション実行後にログ・ファイルには次のように出力されました.
t90rise: v(out)=0.9 AT 8.67877e-006・・・・1回目の立ち上がりで0.9Vとなる時間
sr+: (0.8/(t90rise-t10rise))*1e-6=0.249964・・・・昇りのスルー・レート
t10fall: v(out)=0.1 AT 1.86798e-005・・・・1回目の立ち下がりで0.1Vとなる時間
t90fall: v(out)=0.9 AT 1.54791e-005・・・・1回目の立ち下がりで0.9Vとなる時間
sr-: (0.8/(t10fall-t90fall))*1e-6=0.249946・・・・降りのスルー・レート
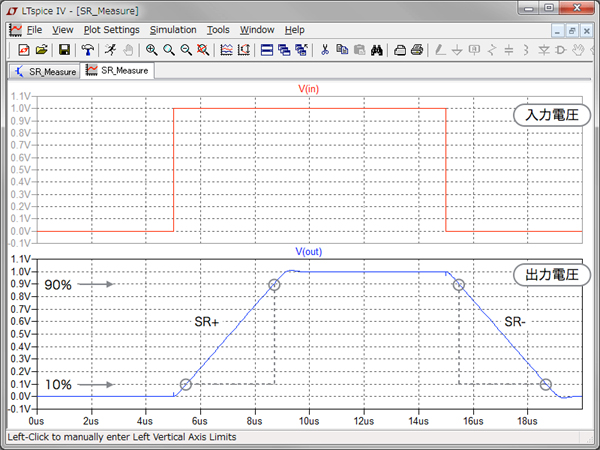
図5は,ボルテージ・フォロワの入力波形と出力波形を示したもので,出力波形は急峻な入力波形の立ち上がり/立ち下がりに追随できず,スルー・レートの傾きをもった応答です.出力波形の四つの箇所(○点)は,「.MEAS」で0.1V,0.9Vになる時間を探し出しました.
●周波数を変化させたときの出力応答を確かめてみます
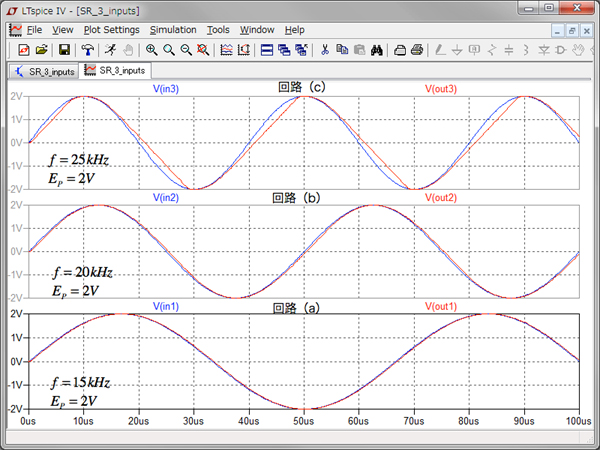
図6は全てのボルテージ・フォロワへの入力信号振幅は「Ep=2V」で一定です.周波数は,(a)が15kHz,(b)が20kHz,(c)が25kHzとして,3種類の出力波形の応答を比較する回路です.
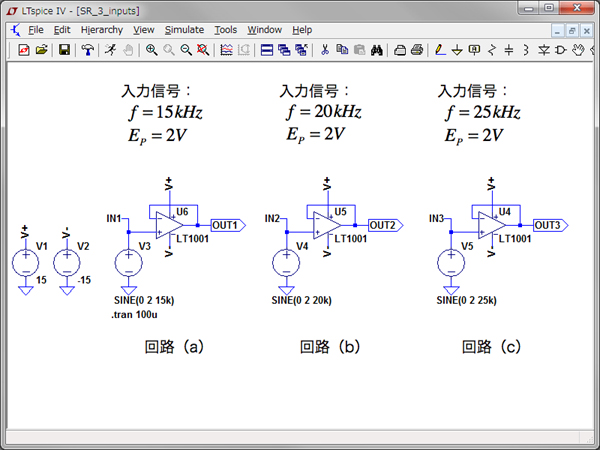
図7は,図6の回路(a),(b),(c)の入力と出力の波形を示しました.周波数が15kHzでは入力と出力の波形は重なっていますが,20kHzになると入力と出力は僅かにズレ始め,25kHzでは出力は入力に追随していません.このようにOPアンプの出力応答はスルー・レートで制限され,スルー・レート以上の時間に対する振幅の変化が大きい入力には出力の応答が追いつきません.
最後に,式3はスルー・レート,周波数,振幅の三つのパラメータで出力が入力に追随できる関係を示しています.「周波数と振幅から波形が歪まないスルー・レートを求める」,「スルー・レートと周波数から波形が歪まない振幅を求める」,「スルー・レートと振幅から波形が歪まない周波数を求める」の目安に使えます.一例を挙げると,可聴周波数の上限を20kHzとし振幅10Vの信号を歪みなく通過させるためには,スルー・レートは1.26V/μs以上必要であることが電卓で導きだせます.便利な式ですので覚えておいて損は無いでしょう.
解説に使用しました,LTspiceの回路をダウンロードできます.
LTspice003.zip
●データ・ファイル内容
SR_Measure.asc:図2の回路
SR_3_inputs.asc:図6の回路
※二つのファイルは同じホルダに保存して,ホルダ名を半角英数にしてください
■LTspice関連リンク先
(1) LTspice ダウンロード先
(2) LTspice Users Club
(3) トランジスタ技術公式サイト LTspiceの部屋はこちら